transformer和卡尔曼滤波的融合_论文2
目录
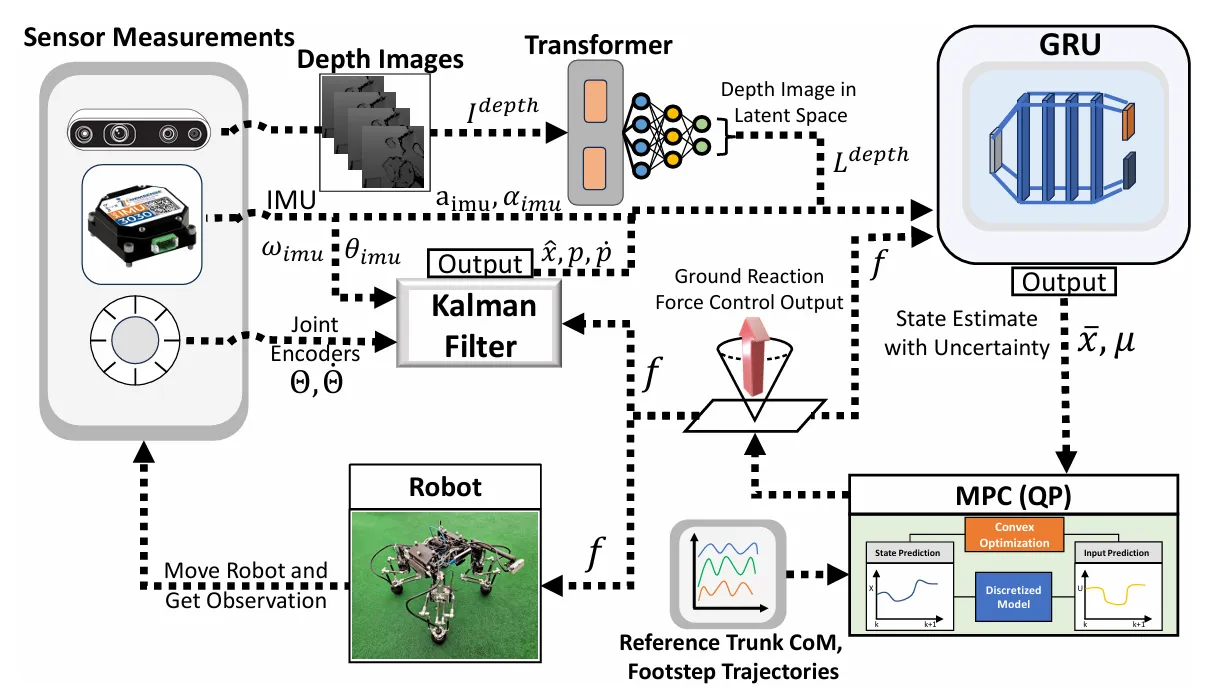
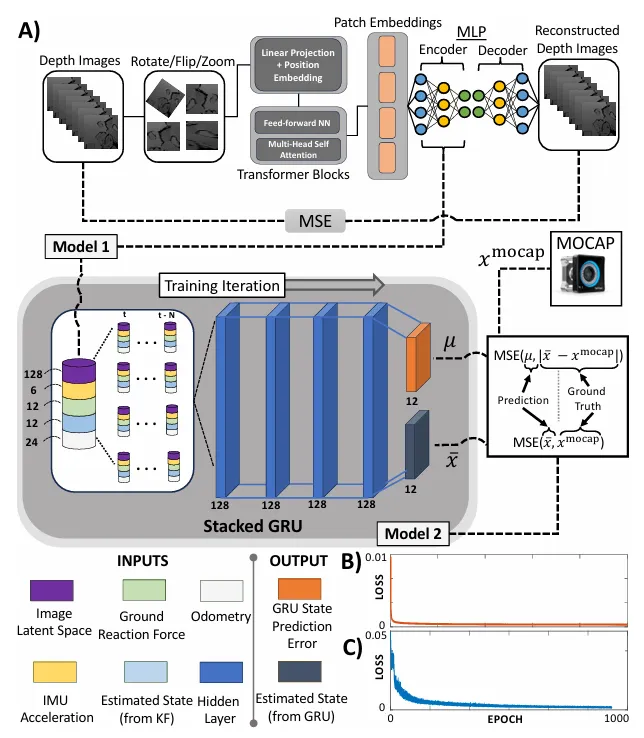
论文题目:OptiState: State Estimation of Legged Robots using Gated Networks with Transformer-based Vision and Kalman Filtering
bash展开代码IMU + 里程计 → 卡尔曼滤波 → 60维特征向量 深度图像 → Transformer编码器 → 128维特征向量 ↓ 特征拼接:60 + 128 = 188维 ↓ 构建序列:10个时间步 × 188维 ↓ GRU网络处理 ↓ 输出:24维(12维状态 + 12维误差估计)
本文作者:cc
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
目录